


102.000đ
102.000đ



 50.000đ
50.000đ
 49.000đ
49.000đ
 47.000đ
47.000đ
 46.000đ
46.000đ
 11.000đ
11.000đ
 40.000đ
40.000đ
 40.000đ
40.000đ
 40.000đ
40.000đ
 18.000đ
18.000đ
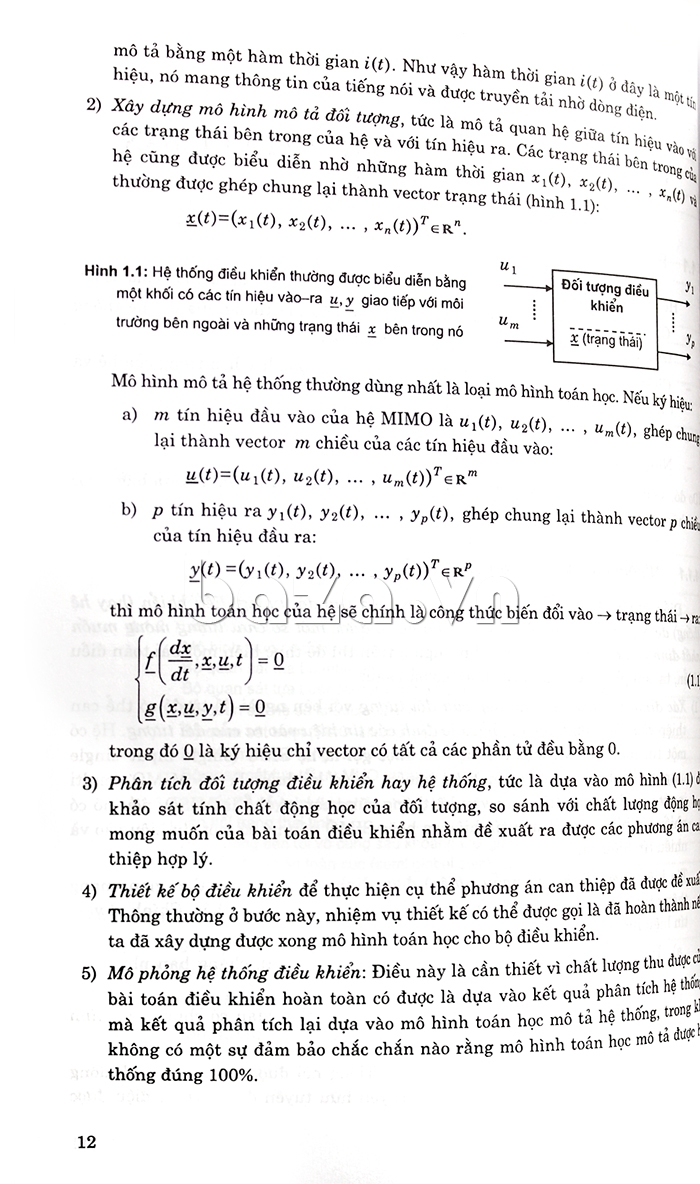
Phân tích và điều khiển hệ phi tuyến (TB)
Nhà xuất bản: Bách Khoa Hà Nội
Tác giả: Nguyễn Doãn Phước
Năm xuất bản: 2016
Số trang: 437
Khổ sách: 16 x 24 cm
Dạng bìa: Bìa mềm
Phân tích và điều khiển hệ phi tuyến luôn là vấn đề thời sự, thu hút được sự quan tâm của những người làm việc trong lĩnh vực kỹ thuật hệ thống. Những phương pháp phân tích và tổng hợp hệ thống trên cơ sở lý thuyết các hệ thống điều khiển phi tuyến đã đưa con người đến gần hơn nữa trong các ứng dụng thực tế cũng như khả năng nâng cao được chất lượng cho các hệ thống điều khiển hiện tại. Nó chính là chiếc cầu nối giữa lý thuyết và ứng dụng thực tiễn. Chính vì thế, ngay từ khi lý thuyết điều khiển được khai sinh, mảng lý thuyết các hệ thống điều khiển phi tuyến đã khẳng định được vị trí của mình. Nhiều phương pháp phân tích và điều khiển hệ phi tuyến đã ra đời và phát triển song song cùng lý thuyết điều khiển tuyến tính cơ bản. Đó là các phương pháp phân tích mặt phẳng pha, phương pháp phân tích và điều khiển hệ Hammerstein, hệ Wiener, phương pháp cân bằng điều hòa, lý thuyết Lyapunov hay phương pháp điều khiển trượt (Sliding Mode ControlSMC).
Đặc biệt, trong những năm gần đây, với sự trợ giúp của nhiều ngành khoa học khác nhau, chuyên ngành phân tích và điều khiển hệ phi tuyến đã có những bước nhảy vọt về chất lượng, cả trong lý thuyết lẫn ứng dụng. Nền móng cho sự phát triển về mặt lý thuyết trước tiên có thể kể đến là phép đổi trục tọa độ vi phôi (diffeomorphism) xây dựng trên nền hình học vi phân, đã tạo ra khả năng nghiên cứu, phân tích, điều khiển hệ phi tuyến theo hướng tận dụng các kết quả đã có của điều khiển tuyến tính, mà điển hình trong số đó là phương pháp thiết kế bộ điều khiển tĩnh phản hồi trạng thái (static states feedback) của Isidori để tuyến tính hóa chính xác hệ phi tuyến, phương pháp phân tích động học không hệ phi tuyến, phương pháp điều khiển kháng nhiễu. Tương tự, Sontag cùng các đồng sự đưa ra khái niệm hàm điều khiển Lyapunov (Control Lyapunov FunctionCLF) đã giúp cho việc giải quyết bài toán thiết kế các bộ điều khiển ổn định được chặt chẽ hơn, rõ ràng hơn, nhất là khi đối tượng có mô hình bất định (uncertainties), hoặc bị thay đổi ngẫu nhiên không biết trước. Cũng như vậy, phương pháp backstepping của Krstic và đồng sự ra đời đã cho phép ta xác định được một cách rất đơn giản hàm CLF cho lớp hệ phi tuyến truyền ngược. Và gần đây nhất là phương pháp điều khiển hệ phẳng (flat) của Fliess cùng cộng sự trên nền đại số vi phân cho phép thiết kế được bộ điều khiển bám phi tuyến và bộ điều khiển động phản hồi trạng thái (dynamic states feedback) để tuyến tính hóa được hệ phi tuyến trong toàn bộ không gian trạng thái.
Xét về khía cạnh ứng dụng thì với sự trợ giúp của lý thuyết tập mờ, công cụ mạng neural, giải thuật di truyền hay kỹ thuật vi điều khiển, khoảng cách giữa lý thuyết và thực tế của hệ phi tuyến đã được thu hẹp đáng kể trong khoảng 18 năm trở lại đây. Điều này có thể nhận thấy được thông qua sự xuất hiện khá nhiều của các dòng sản phẩm thiết bị điều khiển số tự chỉnh định thích nghi cho hệ cơ điện tử, hay các bộ điều khiển lai trên thị trường công nghiệp hiện nay, như các bộ chỉnh định mờ, mờneural, các module điều khiển khả trình có tích hợp chức năng thông minh như lọc Kalman mở rộng, quan sát trạng thái phi tuyến SMO, thiết bị chẩn đoán và cảnh báo lỗi hệ thống.
Bên cạnh sự phát triển mới về chất lượng trên, trường phái phân tích và điều khiển hệ phi tuyến kinh điển cũng đã được bổ sung thêm nhiều kỹ thuật hữu ích khác rất gần với ứng dụng, như kỹ thuật gainscheduling, kỹ thuật điều khiển dự báo theo mô hình (Model Predictiv ControlMPC), phương pháp đa tạp trung tâm. Không những thế, lý thuyết các hệ thống điều khiển phi tuyến còn được ứng dụng thành công cho lớp đối tượng phi tuyến có tính chất động học đặc biệt như các hệ thụ động, các hệ hồi tiếp chặt tham số, hệ tiêu tán .
Sự tiến bộ to lớn đó của chuyên ngành phân tích và điều khiển hệ phi tuyến cần phải được phổ cập và nhanh chóng ứng dụng vào thực tiễn công nghiệp Việt Nam. Đó cũng chính là lý do thôi thúc tác giả viết cuốn sách này. Cuốn sách có mục đích chính là giới thiệu với bạn đọc những phương pháp từ dạng kinh điển tới cấu trúc hiện đại, phục vụ cho bài toán phân tích và thiết kế bộ điều khiển hệ phi tuyến. Vì mong muốn được cùng bạn đọc tiếp tục trao đổi, nên sau mỗi phần trình bày một phương pháp, tác giả đã cố gắng đưa thêm vào những kết quả mở rộng của riêng mình cũng như các suy nghĩ về khả năng mở của nó dưới dạng các lời bàn.
Một điều không thể phủ định là lý thuyết điều khiển tuyến tính luôn là phần nền tảng cơ bản và quan trọng nhất của lý thuyết các hệ thống điều khiển nói chung, trong đó rất nhiều các phát triển mới về khái niệm cũng như phương pháp của điều khiển phi tuyến đều có được sự gợi ý về tư tưởng từ lý thuyết điều khiển tuyến tính. Bởi vậy việc nắm vững và làm chủ lý thuyết điều khiển tuyến tính sẽ giúp ta có được những kiến thức cơ bản, chắc chắn để tự tin tiến sâu hơn vào các lĩnh vực khác của điều khiển. Bạn đọc có thể tìm đọc cuốn sách "Lý thuyết điều khiển tuyến tính" đã xuất bản trước đó của tác giả để tìm hiểu những kiến thức cơ sở về phân tích và điều khiển hệ tuyến tính, qua đó có thể sử dụng cuốn sách này một cách hữu ích hơn.
Cuốn sách này được xem như phiên bản mở rộng và nâng cao của cuốn “Lý thuyết điều khiển phi tuyến” cũng của tác giả và đồng nghiệp đã được xuất bản từ năm 2002. Sách được bố cục thành bốn chương, với mỗi chương được trình bày theo từng đặc điểm ứng dụng của các phương pháp. Do đó trong từng chương sẽ có cả những nội dung nền tảng cơ bản và cả những kết quả mở rộng, nâng cao mới được công bố trong những năm gần đây.
Trước tiên, chương 1 tập trung vào trình bày những vấn đề cơ bản nhất của lĩnh vực phân tích và điều khiển hệ phi tuyến. Đây là những khái niệm, những phương pháp luôn có mặt trong mọi bài toán điều khiển liên quan tới hệ phi tuyến, như định nghĩa, phân loại hệ phi tuyến, nhiệm vụ bài toán phân tích và điều khiển, lý thuyết Lyapunov. Từ nền cơ bản đó, chương 1 sẽ trình bày tiếp các kết quả nâng cao như ổn định theo hàm mũ, ổn định ISS, phương pháp backstepping hay thích nghi giả định rõ (certainty equivalence) và thích nghi nén miền hấp dẫn (damping).
Toàn bộ chương 2 là dành riêng cho việc trình bày các phương pháp phân tích và điều khiển hệ phi tuyến được xây dựng trên nền lý thuyết điều khiển tuyến tính kinh điển, như tuyến tính hóa xấp xỉ xung quanh điểm cân bằng, phân tích tính ổn định hệ phi tuyến tại điểm cân bằng nhờ đa tạp trung tâm, điều khiển tuyến tính hình thức hệ phi tuyến, kỹ thuật gainscheduling, các phương pháp phân tích, tổng hợp bộ điều khiển phi tuyến trên nền hình học vi phân. Trọng tâm của phần trình bày về những kết quả nâng cao mới được công bố trong những năm gần đây của chương 2 bao gồm các phương pháp xác định phép đổi trục tọa độ vi phôi, phương pháp thiết kế bộ điều khiển tĩnh phản hồi trạng thái (static states feedback) để tuyến tính hóa hệ phi tuyến trong toàn bộ không gian trạng thái, các phương pháp phân tích động học không, tính điều khiển được, quan sát được của hệ phi tuyến affine.
Tiếp theo, chương 3 trình bày về các phương pháp phân tích và điều khiển những hệ phi tuyến có đặc thù động học riêng, thường gặp trong thực tế. Đó là những hệ Hammerstein, hệ Wiener, hệ hai cấp, hệ thụ động, hệ EulerLagrange, hệ phẳng. Các phương pháp phân tích và điều khiển kinh điển được trình bày trong chương 3 bao gồm phương pháp phân tích tính ổn định tuyệt đối, khả năng tự dao động và tính ổn định của dao động, phương pháp điều khiển trượt. Ngoài ra, chương 3 còn trình bày những phương pháp mới được bổ sung trong các năm gần đây như điều khiển hai cấp, điều khiển tựa theo thụ động, điều khiển thích nghi bằng mô hình ngược, điều khiển thích nghi giả định rõ hệ EulerLagrange, điều khiển tựa phẳng với khả năng tuyến tính hóa chính xác hệ phi tuyến trong toàn bộ không gian trạng thái nhờ bộ điều khiển động phản hồi trạng thái (dynamic states feedback).
Cuối cùng, chương 4 là phần trình bày về nội dung các phương pháp thiết kế bộ quan sát trạng thái hệ phi tuyến và điều khiển hệ phi tuyến bằng phản hồi đầu ra (dynamic outputs feedback). Đây cũng là những kết quả mới được công bố trong những năm gần đây. Nhiều kết quả lý thuyết đã được chuyển sang thành dạng thuật toán để bạn đọc có thể dễ dàng cài đặt thành chương trình ứng dụng của riêng mình.
Cuốn sách này được viết ra từ các bài giảng của tác giả cho lớp cao học ngành Điều khiển và Tự động hóa và chuyên đề nghiên cứu sinh tại Đại học Bách Khoa Hà Nội về Lý thuyết điều khiển phi tuyến với những nội dung chính như sau:
- Các phương pháp phân tích và điều khiển hệ phi tuyến;
- Ứng dụng các phương pháp tối ưu hóa trong điều khiển;
- Điều khiển tối ưu;
- Điều khiển thích nghi.
Mục đích của tác giả khi viết cuốn sách này chỉ đơn giản là mong muốn cung cấp cho các bạn sinh viên đang theo học các ngành Điều khiển tự động, Đo lường và Tin học công nghiệp, Tự động hóa, thêm một tài liệu bổ trợ cho việc hiểu kỹ, hiểu sâu bài giảng cũng như hỗ trợ việc tự học của sinh viên, học viên cao học, nghiên cứu sinh thuộc các ngành liên quan.
Cuốn sách cũng đã được viết với sự cảm thông, chịu đựng, chia sẻ rất to lớn của những thành viên trong gia đình tác giả là vợ Ngô Kim Thư, con gái Nguyễn Phước My và hai cháu ngoại Bông, Bo. Không có họ chắc chắn cuốn sách không thể hoàn thành. Sách cũng còn được hoàn thành nhờ sự cổ vũ, khuyến khích và tạo điều kiện thuận lợi của các đồng nghiệp trong Bộ môn Điều khiển Tự động, trường Đại học Bách Khoa Hà Nội, nơi tác giả đang công tác. Tác giả xin được gửi tới gia đình và các bạn lời cám ơn chân thành.



 280.000đ
280.000đ
 25.000đ
25.000đ
 130.000đ
130.000đ
 100.000đ
100.000đ
 50.000đ
50.000đ
 41.000đ
41.000đ
 70.000đ
70.000đ
 33.000đ
33.000đ
 30.000đ
30.000đ
 28.000đ
28.000đ
 54.000đ
50.000đ
49.000đ
47.000đ
46.000đ
11.000đ
40.000đ
40.000đ
40.000đ
18.000đ
54.000đ
50.000đ
49.000đ
47.000đ
46.000đ
11.000đ
40.000đ
40.000đ
40.000đ
18.000đ
 36.000đ
280.000đ
25.000đ
130.000đ
100.000đ
50.000đ
41.000đ
70.000đ
33.000đ
30.000đ
28.000đ
54.000đ
36.000đ
280.000đ
25.000đ
130.000đ
100.000đ
50.000đ
41.000đ
70.000đ
33.000đ
30.000đ
28.000đ
54.000đ